|
 环形水槽
 方形水池
 管道全尺寸疲劳试验装置
 立管系统整体行为试验装置
 海底智能管道样机
(1)管道疲劳与断裂
海底管道与海洋立管除了承受传输的油气等介质载荷之外,还承受严酷的环境载荷,存在发生疲劳断裂的风险。环缝疲劳设计除了需要根据BS 7608和DNV RP C203给出的S-N曲线进行分析之外,还需要进行疲劳试验。因为小尺寸疲劳试验试件残余应力与全尺寸管道不同,不能反映管道尺寸和体积效应,存在产生相当冒进的S-N数据的风险,所以必须进行全尺寸疲劳试验。
  水下生产系统与海底管线 海底管道裂纹
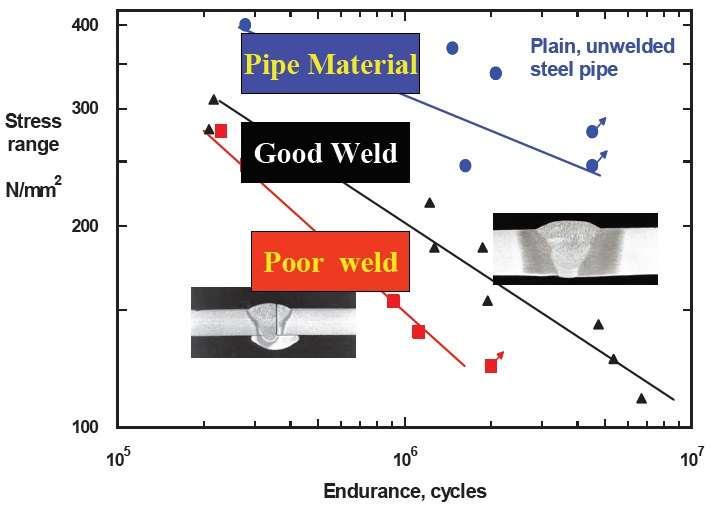 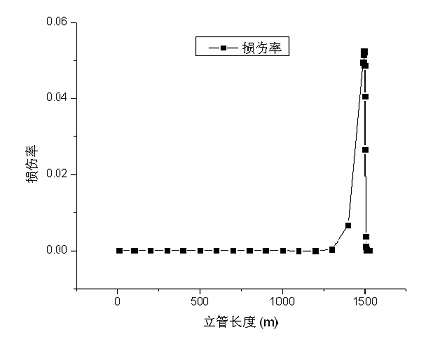 S-N曲线 沿着立管长度的损伤
北京市自然科学基金项目、北京市教育委员会科技计划重点项目“深水立管焊接工艺及疲劳断裂可靠性评估研究”在数值仿真研究的基础之上,结合S-N曲线,采用Miner线性累积损伤理论,计算了顶端张紧立管各节点的疲劳寿命,结果表明由于顶张力以及波浪和海流的联合作用,海平面以附近处节点的立管截面为危险截面,最容易发生疲劳破坏。
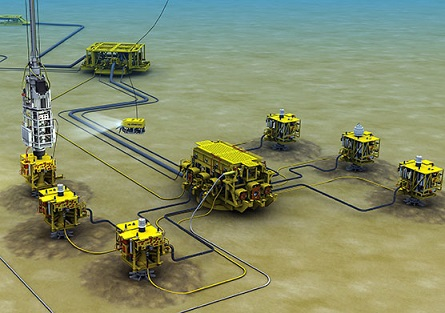
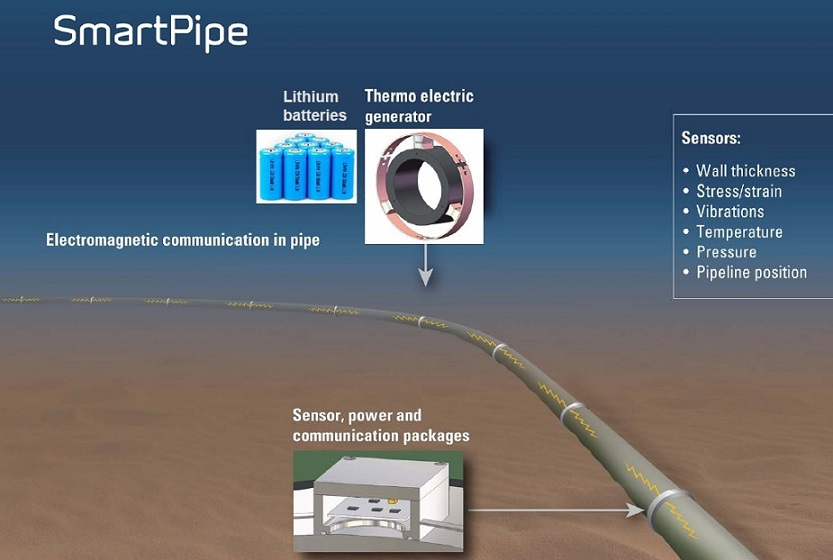
(2)海底智能管道
世界范围内相当部分待铺海底管道处于深水、极地、地震活跃等极端恶劣环境之中,采用智能管道(Smart Pipe)概念对海底管道和海洋立管状态进行连续监测,有利于改善安全控制水平。智能管道是IT技术与管道技术的集成,是下一代管道的重要发展趋势,也是智能油田(Smart Fields)的重要组成部分。
  海底智能管道 深水平台立管系统
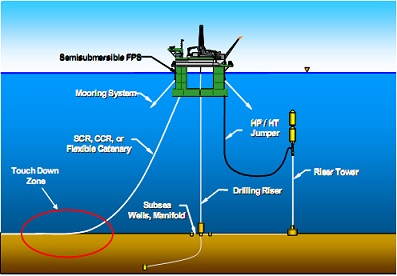
(3)深水立管系统动态响应
载荷中的深水立管,由于张力变化、海流变化、平台位置变化、现场作业因素变化等诸多原因,承受周期性的疲劳载荷作用,存在发生疲劳断裂的风险。
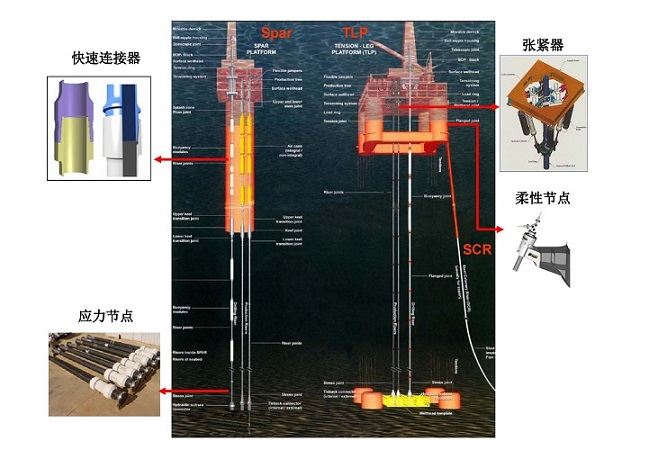
大发dafa888手机经典版在中国海洋石油总公司综合科研项目“深水立管主要部件设计选型技术研究”支持下,针对TTR和SCR两种立管系统主要部件进行了选型设计研究和国产化可行性研究,包括张紧器、快速连接器、应力节点、柔性节点,研究了TTR和SCR立管系统的焊接、连接、检验技术,以及水压试验、排水干燥技术。
立管系统主要部件
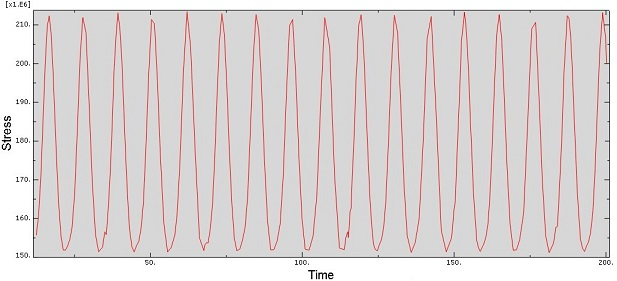 海平面下4m处节点的应力响应
北京市自然科学基金项目、北京市教育委员会科技计划重点项目“深水立管焊接工艺及疲劳断裂可靠性评估研究”采用ABAQUS中的海洋工程模块AQUA对张力腿平台顶端张紧立管在张紧力、波浪和海流共同作用下的动力响应行为进行了数值仿真研究,建立了张力腿平台顶端张紧立管模型,该模型水深设为1500m、海域为南中国海。数值计算表明,由于海平面附近的立管受到波浪和海流的作用,最大应力出现在海平面下4m处,该位置为最危险点。
(4)深水海底管道自动焊接维修
损伤海底管道维修对于海洋油气田安全运行是不可或缺的。钨极氩弧焊(GTAW)可以用于5MPa(相当于500m水深)以内的高压环境,饱和潜水(Saturation Diving)可以用于600m水深(6MPa)以内。水深超过600m的海底管道维修,只能采用无潜水员的自动化维修系统(Diverless System),自动化维修是以水下机器人ROV(Remotely Operated Vehicle)作为载体,通过ROV携带水下自动化机具进行维修作业,可以适用于6MPa以上高压环境下的电弧焊接方法包括等离子弧焊(PAW)和熔化极气体保护焊(GMAW)。
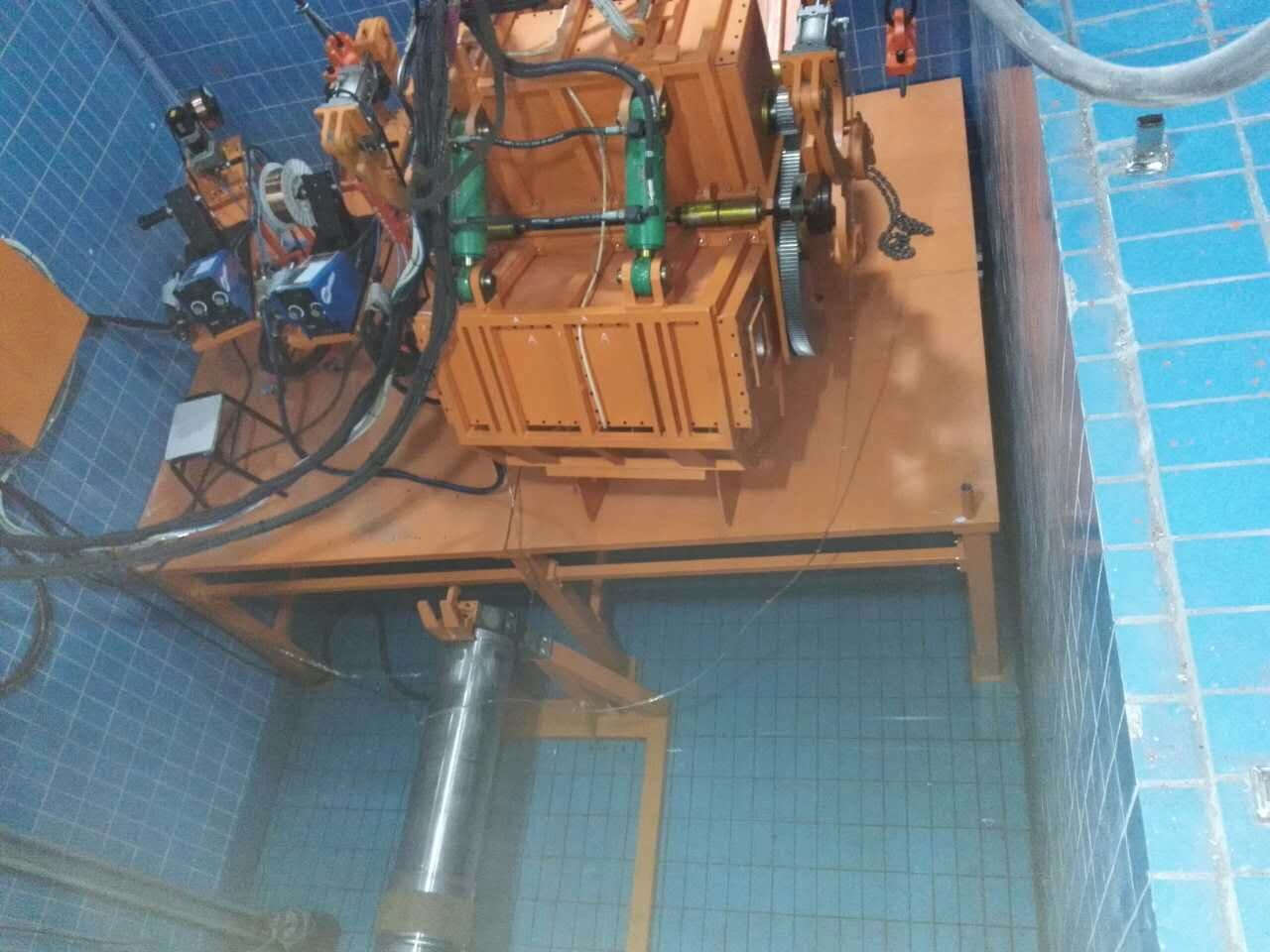 深水海底管道维修遥操作焊接机器人
|